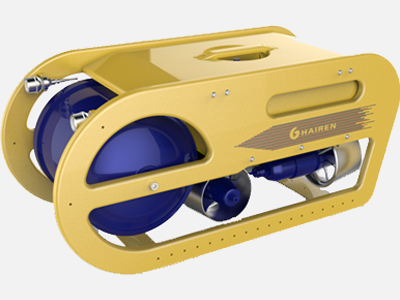
● 机器人本体
● 控制台
● 电动收缆装置
● 助装置(各种工具、各类手爪、无线传输模块、三角支架等)
● 复合型移动机构
● 多功能作业机械手
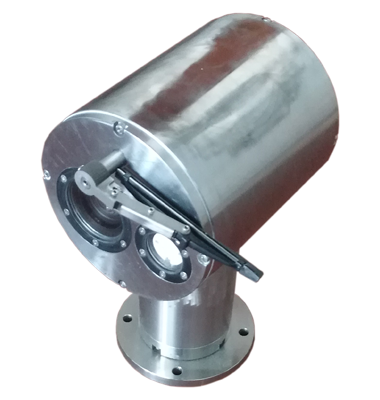
● 云台及观测系统
● 基于嵌入式计算机控制系统
● 传感系统数据
● 图像传输系统操作台显示系统驱动
● 能源系统电动收缆装置

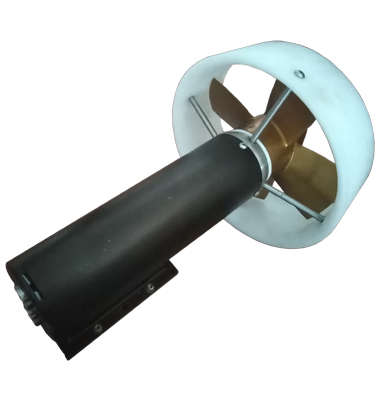
潜深:500米
速度:3节
● 温度:-10。C~50。C
● 湿度:30%~95%
● 具有防水、防潮、性能。
| 有线电缆长度 | 100m |

● 自动调焦主摄像机
● 主摄像机组合 LED 照明灯
● 主摄像机俯仰转动角度:±90º
● 主摄像机水平转动角度:0-320º
● 主摄像机离地高度:约 1100mm
● 备注:机器人配备摄像机数量:共 4 台主摄像机 1 台、小臂摄像机 1台、机器人本体下箱体前后各一台
| 自由度 | 5+1个自由度 |
| 大臂上下摆动角度 | ≦210° |
| 大臂左右转动角度 | ±45° |
| 小臂上下摆动角度 | ≦210° |
| 手腕上下摆动角度 | ≦210° |
| 机械爪旋转角度 | 无限制 |
| 机械爪张开最大宽度 | ≦300mm |
|
最大抓起重量 折叠状态 展开状态 |
25kg 8kg 无线和有线 |
| 外形尺寸(长×宽×高) | 460mm×340mm×260mm |
| 工作台重量(含电缆盘系统) | 50kg |
| 便携式机器人移动工作台重量 | 2kg |
| 显示屏尺寸 | 彩色15英寸液晶显示屏 |
| 电池供电时间 | 4h(控制平台) |
| 控制装置 | 2个操作杆及全部功能控制面板 |